That all sounds correct. You should set the amplifier such that a 10V command coming in will give the highest speed you will ever need. An output of 4096 DAC Counts corresponds to 10V. So for example limiting the Max Output on the Step Response Screen to 2048 will limit the output to +/-5V or 50% of your max Amplifier speed.
HTH
TK
| Group: DynoMotion |
Message: 3743 |
From: oxforduniv |
Date: 2/6/2012 |
| Subject: Re: Servo question |
I think you will find that AMC recommend Torque (transconductance) mode, at least that is the way I have always used them in with CNC applications?
Al.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> That all sounds correct. You should set the amplifier such that a 10V command coming in will give the highest speed you will ever need. An output of 4096 DAC Counts corresponds to 10V. So for example limiting the Max Output on the Step Response Screen to 2048 will limit the output to +/-5V or 50% of your max Amplifier speed.
> Â
> HTH
> TKÂ
>
> From: mrosenfield2 <mrosenfield@...>
> To: DynoMotion@yahoogroups.com
> Sent: Monday, February 6, 2012 9:04 AM
> Subject: [DynoMotion] Servo question
>
>
> Â
> Tom,
> I've just about got enough of my mill wired so I can fire up the servos.
> In going over the Advanced Motion Control drive documentation, I find myself getting a little confused.
> If memory serves, the drive should be set to use tach feedback and +/-10v input to control motor speed, with the KFlop/Kanalog closing the position loop (using encoder feedback), as well as using its analog output to specify motor speed during axis moves.
> Is this correct?
> There is some gain adjustment available in the servo, and the servo manual suggests applying 1V and adjusting the gain to get desired speed.
> So, how (and where) does Kanalog output get tied to speed? Or is this in the part of axis setup config screen where maximum speed is specified? Does this mean that max speed = 10V?
> Thanks.
> |
|
| Group: DynoMotion |
Message: 3747 |
From: Tom Kerekes |
Date: 2/6/2012 |
| Subject: Re: Servo question |
Hi Al,
I think it can be done both ways. If you don't have a tachometer then you have no choice but to use Torque mode. But I recommend using velocity mode for two reasons. Velocity feedback is very important for a good servo loop and an analog velocity measurement has potentially higher resolution than trying to derive velocity from encoder changes. Secondly it is easier to tune a position loop where velocity is commanded rather than torque (acceleration). Simple P gain can work pretty well with a velocity servo (go slower as you get closer). But when acceleration is commanded simple P gain won't work (accelerate less as you approach the target = keep going faster until you cross the target).
It also works well if one has glass scales. Velocity feedback from the motor shaft, and Position feedback from the scales.
Regards
TK
| Group: DynoMotion |
Message: 3748 |
From: Michael Rosenfield |
Date: 2/6/2012 |
| Subject: Re: Servo question |
I assume torque mode is current mode? According to the manual for the 16A20AC drive I have, there is a choice of current mode, voltage mode, IR compensation mode, and tach mode. Only one can be selected at a time. Tach mode is the only one that gives closed-loop control of motor speed. Michael
| Group: DynoMotion |
Message: 3750 |
From: Tom Kerekes |
Date: 2/6/2012 |
| Subject: Re: Servo question |
Hi Michael,
Yes current mode = torque mode = acceleration (ignoring friction)
TK
| Group: DynoMotion |
Message: 3755 |
From: oxforduniv |
Date: 2/6/2012 |
| Subject: Re: Servo question |
Quote from AMC application notes for all four forms of drive control.
"The Current (Torque) mode is recommended in applications using a digital position controller".
The Tach velocity mode was used on older systems before torque mode became popular.
Galil also recommends the Torque mode in their systems.
Al.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Michael,
> Â
> Yes current mode = torque mode = acceleration (ignoring friction)
> Â
> TK
>
> From: Michael Rosenfield <mrosenfield@...>
> To: dynomotion@yahoogroups.com
> Sent: Monday, February 6, 2012 5:02 PM
> Subject: RE: [DynoMotion] Re: Servo question
>
>
> Â
> I assume torque mode is current mode? According to the manual for the 16A20AC drive I have, there is a choice of current mode, voltage mode, IR compensation mode, and tach mode. Only one can be selected at a time. Tach mode is the only one that gives closed-loop control of motor speed.
> Michael
> Â
>
> To: DynoMotion@yahoogroups.com
> From: oxforduniv@...
> Date: Tue, 7 Feb 2012 00:36:07 +0000
> Subject: [DynoMotion] Re: Servo question
>
> Â
> I think you will find that AMC recommend Torque (transconductance) mode, at least that is the way I have always used them in with CNC applications?
> Al.
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > That all sounds correct.ÃÂ You should set the amplifier such that a 10V command coming in will give the highest speed you will ever need.ÃÂ An output of 4096 DAC Counts corresponds to 10V.ÃÂ So for example limiting the Max Output on the Step Response Screen to 2048 will limit the output to +/-5V or 50% of your max Amplifier speed.
> > ÃÂ
> > HTH
> > TKÃÂ
> >
> > From: mrosenfield2 <mrosenfield@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Monday, February 6, 2012 9:04 AM
> > Subject: [DynoMotion] Servo question
> >
> >
> > ÃÂ
> > Tom,
> > I've just about got enough of my mill wired so I can fire up the servos.
> > In going over the Advanced Motion Control drive documentation, I find myself getting a little confused.
> > If memory serves, the drive should be set to use tach feedback and +/-10v input to control motor speed, with the KFlop/Kanalog closing the position loop (using encoder feedback), as well as using its analog output to specify motor speed during axis moves.
> > Is this correct?
> > There is some gain adjustment available in the servo, and the servo manual suggests applying 1V and adjusting the gain to get desired speed.
> > So, how (and where) does Kanalog output get tied to speed? Or is this in the part of axis setup config screen where maximum speed is specified? Does this mean that max speed = 10V?
> > Thanks.
> >
> |
|
| Group: DynoMotion |
Message: 3759 |
From: Michael Rosenfield |
Date: 2/6/2012 |
| Subject: Re: Servo question |
Al, Where did you see this? Here is what I find on page 14 of "AMC_AnalogDrives_InstallManual.pdf" ,off the AMC website.
2.6.1 Current (Torque) Mode In Current (Torque) Mode, the input command voltage controls the output current. The drive will adjust the output duty cycle to maintain the commanded output current. This mode is used to control torque for rotary motors (force for linear motors), but the motor speed is not controlled
Since we are concerned about feedrate, we have to control the motor speed, yes? Michael
| Group: DynoMotion |
Message: 3762 |
From: Tom Kerekes |
Date: 2/6/2012 |
| Subject: Re: Servo question |
Hi Al,
Like I said you can do it either way you wish. It would be helpful to have the justification for their statements. Here is my experience:
Using Tachometer feedback to Amplifier
----------------------------------------------------------
Advantage - theoretically infinite resolution on velocity. Especially useful when lower res encoders are used as it provides sub-encoder count velocity information
Advantage - makes position loop tuning easier for beginners - P works
Advantage - safer as limiting command voltage limits max speed
Disadvantage - Needs Analog input, tachometer, wiring
Disadvantage - Analog signal may have noise
Disadvantage - Velocity loop tuning by adjusting pots in amplifier (hard to know if it is correct)
Using Encoder only and Torque mode
------------------------------------------------------
Advantage - no Tach, Analog input, wiring needed
Advantage - all digital tuning
Disadvantage - no or little feedback information at very slow speeds (hunting)
Disadvantage - Tuning requires at least P+D to be stable
Disadvantage - no easy way to limit max speed (even small acceleration can grow to high speed)
Regards
TK
| Group: DynoMotion |
Message: 3765 |
From: Tom Kerekes |
Date: 2/6/2012 |
| Subject: Re: Servo question |
Hi Michael,
That just means the speed is not controlled by the Amplifier. But it is still possible for the Controller (KFLOP) to control the feedrate (and axis position) by commanding the Torque in just the right way.
Regards
TK
| Group: DynoMotion |
Message: 3769 |
From: Michael Rosenfield |
Date: 2/6/2012 |
| Subject: Re: Servo question |
Tom, How critical do you think it would be to have tach feedback on quill or knee travel? For my mill, the feed speeds of both range from 1.5 - 26 IPM, which translates to drive motor speed of 17 - 300 RPM Rapid is closer to 200 ipm, but of course, the actual speed there is unimportant. My x & y axes already have tachs on the motors, and the AMC amps have tach inputs, so I might as well use them. But the knee and quill motors don't have tachs (yet). Regards, Michael
| Group: DynoMotion |
Message: 3770 |
From: Tom Kerekes |
Date: 2/6/2012 |
| Subject: Re: Servo question |
Hi Michael,
It should work fine.
Regards
TK
| Group: DynoMotion |
Message: 3778 |
From: oxforduniv |
Date: 2/7/2012 |
| Subject: Re: Servo question |
Yes it is the 2.6.1. I was referring to, I have been using AMC drives in this manner with CNC Motion card type servo control for around 25yrs now.
With the tuning s/w I have used so far, the torque mode has offered the best results.
I assume you have DC brushed motors?
You rarely find new DC motors supplied with a tach now.
You could try both methods I suppose?
Al.
--- In DynoMotion@yahoogroups.com, Michael Rosenfield <mrosenfield@...> wrote:
>
>
> Al,Where did you see this?Here is what I find on page 14 of "AMC_AnalogDrives_InstallManual.pdf" ,off the AMC website.ã
> ã
> 2.6.1 Current (Torque) ModeIn Current (Torque) Mode, the input command voltage controls the output current. The drive will adjust the output duty cycle to maintain the commanded output current. This mode is used to control torque for rotary motors (force for linear motors), but the motor speed is not controlled
> Since we are concerned about feedrate, we have to control the motor speed, yes? Michael
> To: DynoMotion@yahoogroups.com
> From: oxforduniv@...
> Date: Tue, 7 Feb 2012 02:12:32 +0000
> Subject: [DynoMotion] Re: Servo question
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
> >
> |
|
| Group: DynoMotion |
Message: 3779 |
From: Michael Rosenfield |
Date: 2/7/2012 |
| Subject: Re: Servo question |
The machine (and xy servos) is from 1975. Brushed DC, yes. I'll probably try both, just for grins. The quill and knee motors (also brushed DC) don't have tachs, so I'll try them in torque mode - tachs are expensive! Michael
| Group: DynoMotion |
Message: 3784 |
From: oxforduniv |
Date: 2/7/2012 |
| Subject: Re: Servo question |
If you try in torque mode, remember to disconnect the tach from the AMC.
Al.
--- In DynoMotion@yahoogroups.com, Michael Rosenfield <mrosenfield@...> wrote:
>
>
> The machine (and xy servos) is from 1975. Brushed DC, yes.I'll probably try both, just for grins. The quill and knee motors (also brushed DC) don't have tachs, so I'll try them in torque mode - tachs are expensive! Michael
> To: DynoMotion@yahoogroups.com
> From: oxforduniv@...
> Date: Tue, 7 Feb 2012 16:18:31 +0000
> Subject: [DynoMotion] Re: Servo question
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
>
> Yes it is the 2.6.1. I was referring to, I have been using AMC drives in this manner with CNC Motion card type servo control for around 25yrs now.
>
> With the tuning s/w I have used so far, the torque mode has offered the best results.
>
> I assume you have DC brushed motors?
>
> You rarely find new DC motors supplied with a tach now.
>
> You could try both methods I suppose?
>
> Al.
>
>
>
> --- In DynoMotion@yahoogroups.com, Michael Rosenfield <mrosenfield@> wrote:
>
> >
>
> >
>
> > Al,Where did you see this?Here is what I find on page 14 of "AMC_AnalogDrives_InstallManual.pdf" ,off the AMC website.ã
>
> > ã
>
> > 2.6.1 Current (Torque) ModeIn Current (Torque) Mode, the input command voltage controls the output current. The drive will adjust the output duty cycle to maintain the commanded output current. This mode is used to control torque for rotary motors (force for linear motors), but the motor speed is not controlled
>
> > Since we are concerned about feedrate, we have to control the motor speed, yes? Michael
>
> > To: DynoMotion@yahoogroups.com
>
> > From: oxforduniv@
>
> > Date: Tue, 7 Feb 2012 02:12:32 +0000
>
> > Subject: [DynoMotion] Re: Servo question
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> > >
>
> >
> |
|
| Group: DynoMotion |
Message: 4304 |
From: Michael Rosenfield |
Date: 3/24/2012 |
| Subject: Re: Servo question |
Tom, Finally got the quill motor and encoder wired and the amp set up. It's operating in current mode. Amp tests properly with a voltage input. However, I get no movement using Kmotion. Tomorrow I'll stick a scope on the output, but with a DMM on it today, it appears not to be providing full scale voltage out to the amp - looks like 1.5 v max. Do I set something up differently in KFlop for current mode compared to velocity mode? The two velocity-mode axes are working just fine. Thanks, Michael
| Group: DynoMotion |
Message: 4305 |
From: Tom Kerekes |
Date: 3/24/2012 |
| Subject: Re: Servo question |
Hi Michael,
I don't know what your configuration is or what you are doing.
The max ouput would be limited to the Max Output Parameter on the Step Response Screen.
I don't understand how you can be getting 1.5V command to the Amplifier and no movement.
Nothing is really set differently for current vs velocity amplifers except tuning will be different.
Regards
TK
| Group: DynoMotion |
Message: 4312 |
From: Michael Rosenfield |
Date: 3/25/2012 |
| Subject: Re: Servo question |
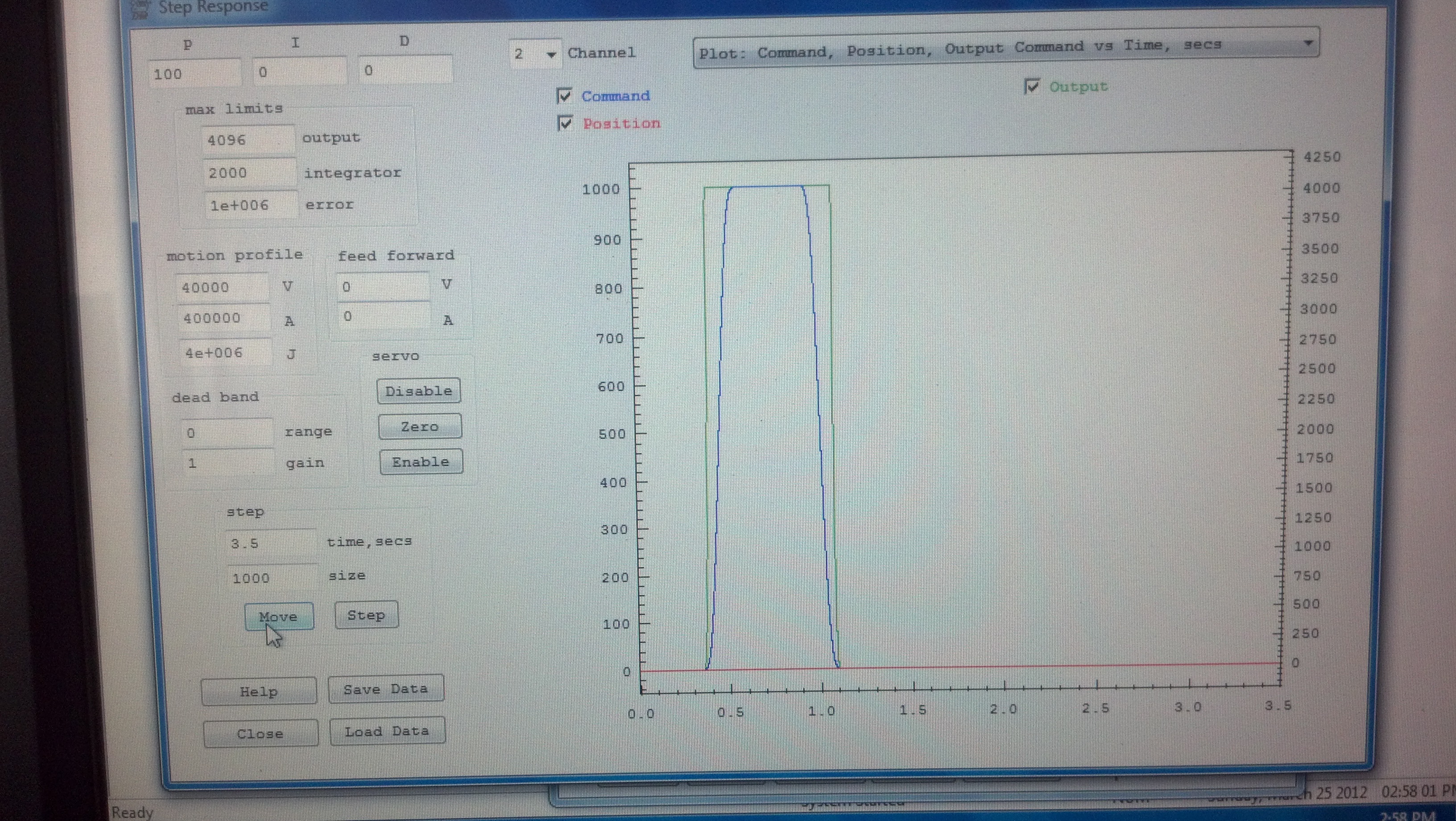
Tom, I have axis 2 (third axis) set up the same, as near as I can tell, as axiis 0 & 1. The gain is different, of course. Sorry for the poor quality of the photographs, but here is the screen plot of the move, and a scope plot of the output to the amp. If I set the gain to P=10, it looks the same, with lower spikes. Any thoughts? Michaelo
| Group: DynoMotion |
Message: 4314 |
From: Tom Kerekes |
Date: 3/25/2012 |
| Subject: Re: Servo question [2 Attachments] |
Hi Michael,
Basically nothing is working.
The plot shows no encoder motion - you forgot to mention if the motor moves at all.
The plot shows full output (green plot goes to 4096 DAC counts - beyond full +10V) being commanded for more than 1/2 second.
Your scope doesn't show the DAC output pulsing to 10V for 1/2 second. It looks like maybe your scope is set to measure current rather than voltage?
You need to go back to basics:
#1 test the DAC/Amplifier/Motor by commanding something like DAC2=200 to apply 1V to the amplifier. Verify the voltage with a scope or meter. Verify the motor runs at 10% full speed.
#2 check the encoder feedback. Move the encoder and verify the Axis Screen show the Position counting up and down appropriately with the motion.
Regards
TK
| Group: DynoMotion |
Message: 4316 |
From: Michael Rosenfield |
Date: 3/25/2012 |
| Subject: Re: Servo question |
Yes, I agree that the DAC output does not appear to match the commanded output. It looks to me like there is a problem with the KFlop output, or I have something set up wrong. The motor does not move at all - doesn't even try to move. The amp/motor system was tested with a pot to +/- 10V on its input, and it works as expected. This motor is running in current mode, with no speed feedback to the amp. The scope is set to measure volts, at 2 v/div. Both output 2&3 look like this, with or without the amp connected to the Kanalog output. Output 0&1, the axes that are tuned reasonably well, have outputs that match more closely with the move output screen, although they are a bit noisier. They are running in velocity mode, with tach feedback to the amps. Thanks, Michael
| Group: DynoMotion |
Message: 4317 |
From: Tom Kerekes |
Date: 3/25/2012 |
| Subject: Re: Servo question |
Oh I was looking at trace B setup.
To test KFLOP=Kanalog DACS do as I suggested.
Disconnect everything from KFLOP and Kanalog except +5V and USB.
Cycle Power on KFLOP so it is in a default unconfigured state.
Run KMotion.exe | Console screen and command DAC values to each of the 8 DACS.
DAC0=200
DAC0=2000
DAC0=-200
DAC0=-2000
DAC1=200
DAC1=2000
DAC1=-200
DAC1=-2000
DAC2=200
DAC2=2000
DAC2=-200
DAC2=-2000
etc
Verify DC voltages with a voltmeter. You should see appoximately 1V, 10V, -1V, -10V
If this isn't working properly the board has been damaged.
TK
| Group: DynoMotion |
Message: 4323 |
From: Michael Rosenfield |
Date: 3/25/2012 |
| Subject: Re: Servo question |
Tom, I checked out Dac0-3 as you said, and they all work fine, even with everything connected. DACx=0 is about 0.05 V - is there a way to trim this? Once I do a move command with kmotion, the output=0 when the axis is supposed to be at rest, however. Also, once I do a move command, the console command DACx=xx no longer changes the DAC output - is this normal? I also moved the Z axis around by hand, and the encoder behaves as it should. Its rotation is the opposite of the motor rotation, so I set its gain to -1. The amp driving the motor is not very linear when the motor is under load - takes almost 5 volts just to get it turning. However, I can still feel the motor shaft jump at the beginning of the move and at the end, and the voltmeter jumps, too. Commanding a 10,000 count move does not get a long 10V output on the DAC - it is still outputting the spikes I sent you earlier. I am not getting following errors, either. So the DAC output is still not following the output graph. Next? Michael
| Group: DynoMotion |
Message: 4324 |
From: TK |
Date: 3/25/2012 |
| Subject: Re: Servo question |
Oh please set the Max Output to 2047 which is 10V. There may be a wraparound issue when trying to command more than 10V.
TK
Tom, I checked out Dac0-3 as you said, and they all work fine, even with everything connected. DACx=0 is about 0.05 V - is there a way to trim this? Once I do a move command with kmotion, the output=0 when the axis is supposed to be at rest, however. Also, once I do a move command, the console command DACx=xx no longer changes the DAC output - is this normal? I also moved the Z axis around by hand, and the encoder behaves as it should. Its rotation is the opposite of the motor rotation, so I set its gain to -1. The amp driving the motor is not very linear when the motor is under load - takes almost 5 volts just to get it turning. However, I can still feel the motor shaft jump at the beginning of the move and at the end, and the voltmeter jumps, too. Commanding a 10,000 count move does not get a long 10V output on the DAC - it is still outputting the spikes I sent you earlier. I am not getting following errors, either. So the DAC output is still not following the output graph. Next? Michael
| Group: DynoMotion |
Message: 4327 |
From: Michael Rosenfield |
Date: 3/26/2012 |
| Subject: Re: Servo question |
Tom, That was the problem! Working fine now. However, I had axis1 also set to 4096, and it worked fine. Of course that axis has much quicker response. Anyway, I set them all to 2047. New question: My Z axis is a very slow response - 5000 count/sec max velocity. I can't get any movement on the Bode plot, even with 5Hz limit and 2000 count move. Anything else I can set on the Bode plot? Any guesses for gain settings? Currently, I have P=2.6 Any more than 0.0001I and I get some damped oscillation. FE is around 300 counts. Feed forward doesn't seem to make much difference. Thanks, Michael
| Group: DynoMotion |
Message: 4328 |
From: Tom Kerekes |
Date: 3/26/2012 |
| Subject: Re: Servo question |
Hi Michael,
If things are working correctly the axis should never try to exceed max output of 10V so it wouldn't make any difference.
I don't know, it is a bit of a catch22 as the axis must be working somewhat in order to measure how it is working.
Current (acceleration) mode has more phase lag than velocity mode because position is the 2nd integral of acceleration where position is only the 1st integral of velocity. So try adding more phase lead down at the low frequency range. Did you intend to include any plots?
Regards
TK
| | | |
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
{kind=link}
{kind=link}